Projet Ergo Race
Nicolas Griffe et Thierry Salem, enseignants STI2D (ITEC et SIN), Lycée Alfred Kastler, TalenceDurée
45h (année complète)
Public
Première
Discipline(s)
STI2D
Thématique(s)
Compétition, design, modélisation
Notion(s)
Conception, modélisation, design, servomoteurs, structure
Description
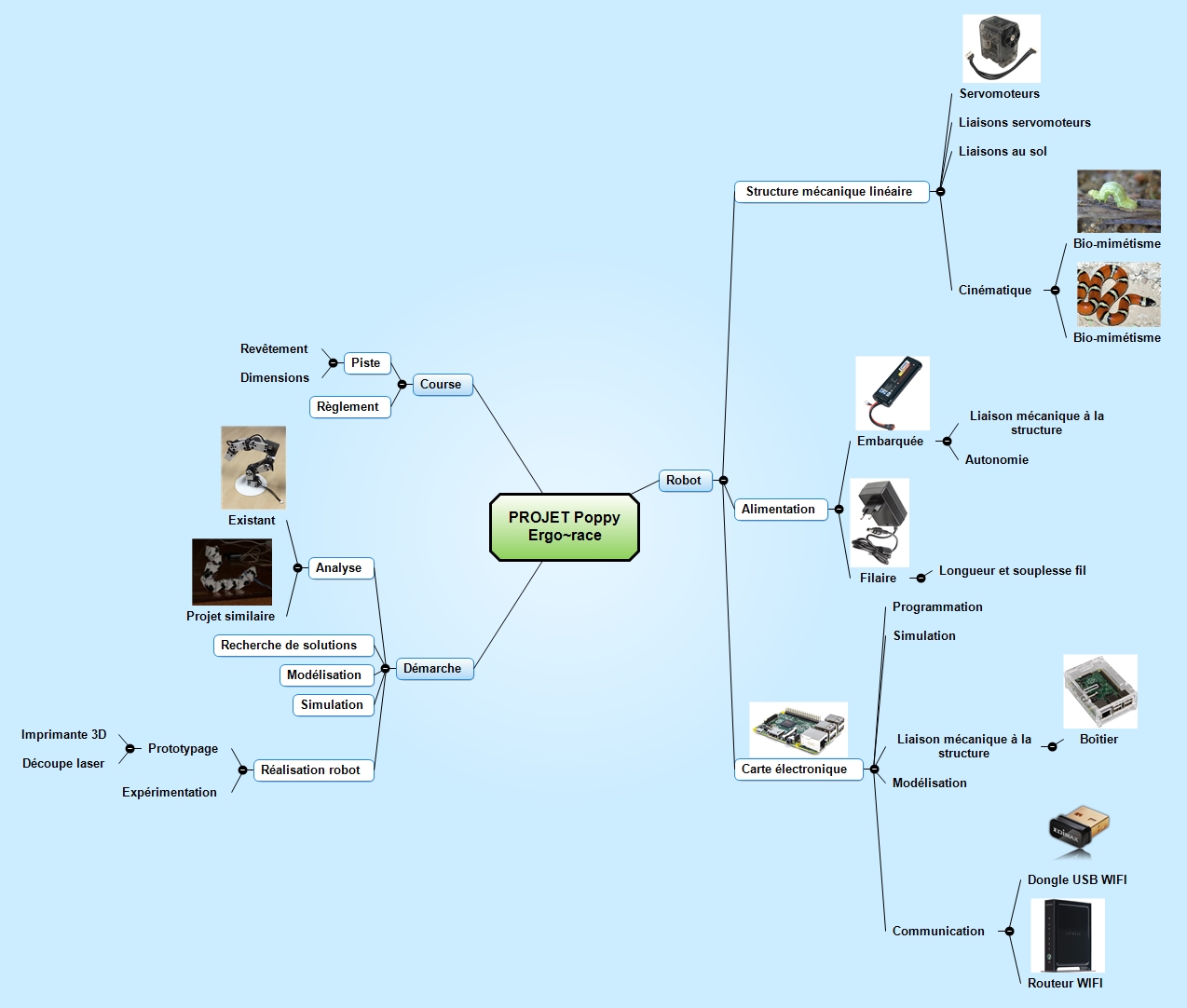
Les élèves doivent par équipes concevoir et réaliser un robot dérivé du modèle Poppy Ergo Jr.
Ce projet a pour but de participer à un défi organisé en fin d’année de première et concerne les classes de 1ST1 et 1ST2 suivant les enseignements de spécialité ITEC et SIN. Le défi prendra la forme d’une compétition sur les deux aspects suivants :
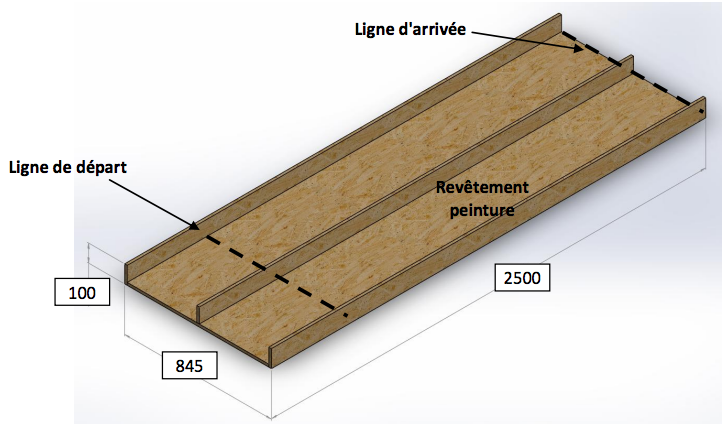
- participer à une course de vitesse
- participer à un concours de design
Objectifs
- Améliorer un produit existant
- Respecter les contraintes économiques
- Design d’un produit jusqu’à la fabrication du prototype (ITEC)
- Réalisation de commande de moteurs / robots à distance (SIN)
Matériel nécessaire
- 1 Poppy Ergo Jr par groupe-projet
- Imprimante 3d / découpe laser / fraiseuse numérique (en fonction du procédé de fabrication choisi)
Remarques / Variantes
Lors de la réalisation du projet en classe, l’objectif de réaliser des robots complets et fonctionnels n’a pas été atteint par les élèves. Principalement, les raisons sont liées aux contraintes inhérentes à la mise en place d’un nouveau projet. Cette session considérée comme expérimentale a permis de faire un bilan sur les différents points du projet à faire évoluer ou changer pour les prochaines sessions. Voir le bilan complet.
Ressources