Modélisation du port automatisé de Rotterdam
Sylvain Soulard, enseignant en technologie au collège Anatole France de Cadillac en Gironde, a créé l’activité « Modélisation du port de Rotterdam ». Sa démarche est de faire travailler ses élèves sur les usages de la robotique autour d’un cas concret. Pour cela, il est parti de la problématique : comment optimiser et sécuriser le transport de conteneurs dans un port marchand ?
Tout d’abord, il a présenté le fonctionnement traditionnel d’un port marchand : Les dockers débarquent les conteneurs « à la main ». Cette mise en situation permet de se rendre compte de la pénibilité et du danger de ces tâches, et de faire réflechir à la problématique posée. C’est un excellent exemple de scénarisation d’activité ! Ainsi, les élèves de 3ème vont mener ce projet sur plusieurs séances.
Ci-dessous, vous pouvez visionner une interview de Sylvain Soulard qui parle de son projet sur LudomagTV.
Déroulement de l’activité
Problématique de départ : Comment optimiser et sécuriser le transport de conteneurs dans un port marchand ?
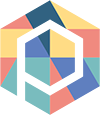
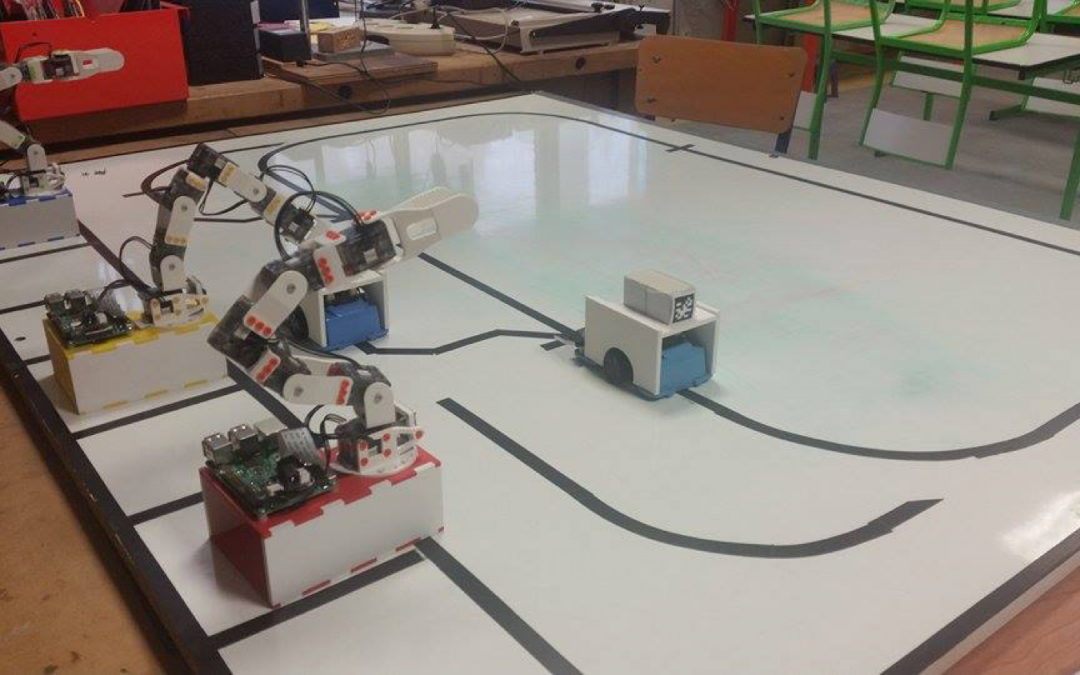
Pour pouvoir répondre à cette question, les élèves ont travaillé sur 2 axes d’étude, le convoyage automatisé et la manutention des conteneurs. Pour la partie convoyage, les élèves ont utilisé les robots Picaxe que nous avions dans notre laboratoire de technologie. Ceux-ci sont équipés de capteurs infrarouges pour le suivi de ligne et de capteurs à ultrasons pour la détection d’obstacles mais tous les robots roulants équipés de ce type de capteurs font tout à fait l’affaire, à commencer par le robot Thymio.

Pour cette partie, les problématiques étaient les suivantes :
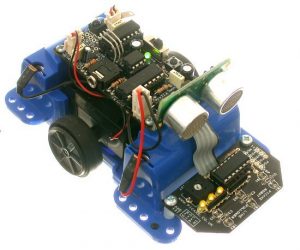
- Comment assurer une trajectoire précise et fiable au robot convoyeur ?
- Comment le robot convoyeur peut-il s’arrêter à un endroit précis ?
- Comment le robot convoyeur peut-il éviter une collision avec un autre convoyeur ?
Les solutions adoptées par les élèves ont été un guidage au sol du convoyeur et l’utilisation du détecteur d’obstacle.
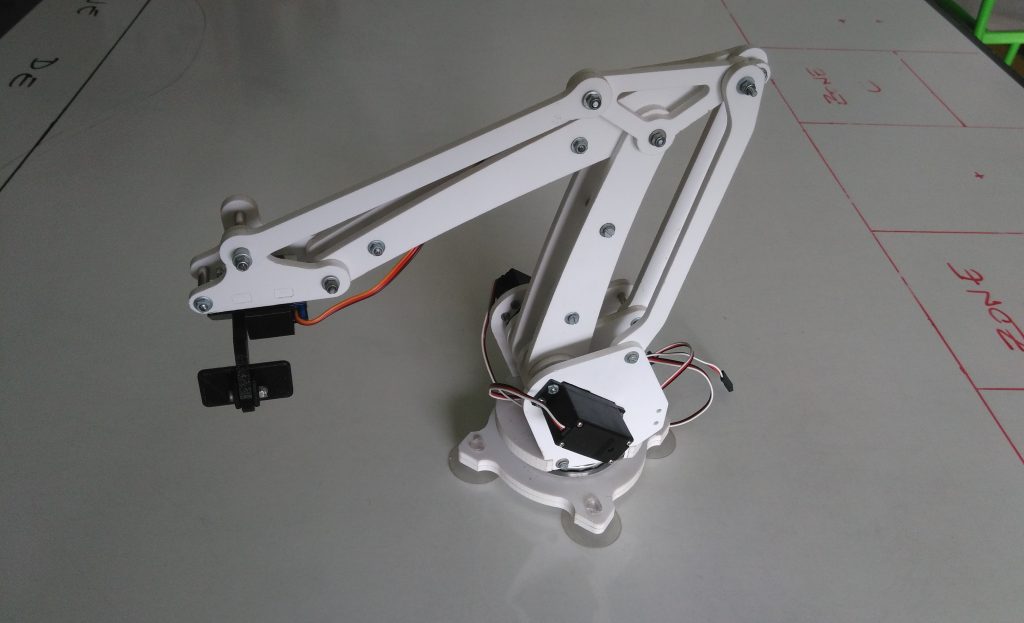
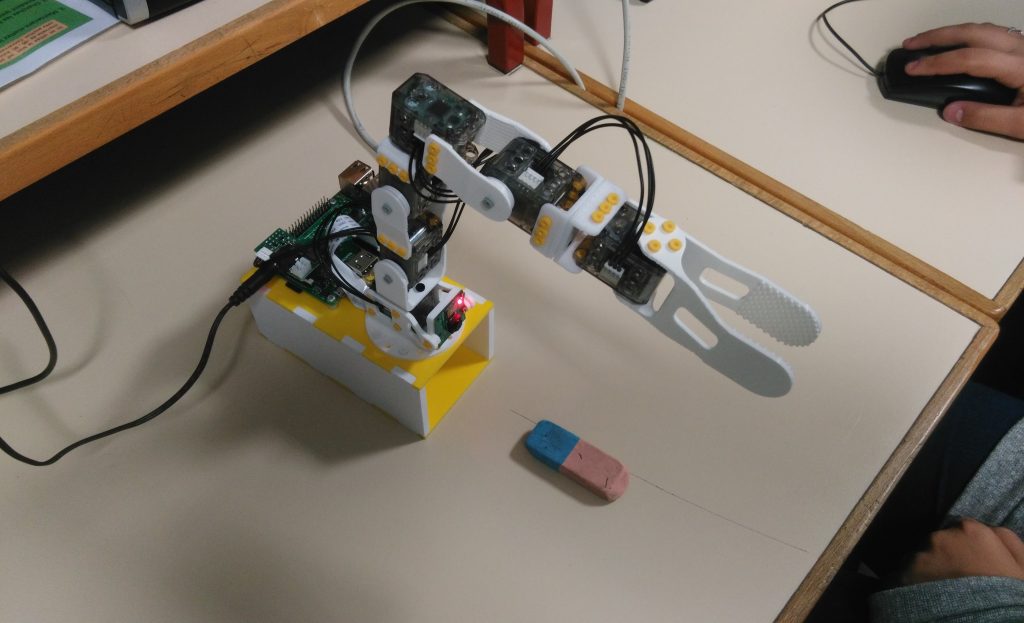
Concernant la manutention des conteneurs, les élèves ont d’abord travaillé sur un bras robotisé fabriqué dans le laboratoire de technologie pour lequel ils ont dû créer un système de préhension puis, dans un second temps, ils ont pu travailler sur l’Ergo Jr.
Dans les deux cas, les problématiques étaient identiques :
- Comment saisir le conteneur ?
- Comment déplacer et stocker le conteneur ?
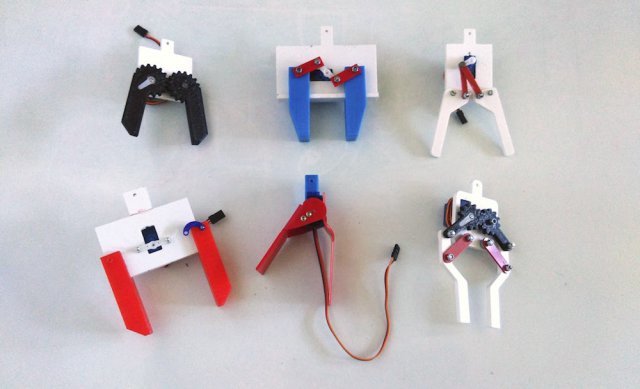
Sur le bras robotisé du labo, les élèves ont donc modélisé et usiné ou imprimé des pinces adaptées au conteneur.
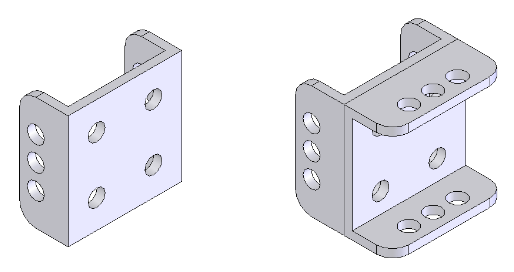
Sur le bras Ergo Jr, les élèves ont redessiné certaines pièces d’assemblage pour orienter la pince dans le sens adapté au conteneur :
Si vous désirez reproduire cette activité avec vos élèves, vous pouvez retrouver toutes les ressources nécessaires sur la page de l’activité.
Si vous désirez échanger à propos de l’activité, vous pouvez également vous rendre sur le forum.
Ci-dessous, deux vidéos du projet mené à terme :
Une vidéo du projet avec le bras robotisé fabriqué dans le labo de technologie
Une vidéo avec l’Ergo Jr et l’utilisation des QRCodes pour automatiser l’ensemble du système
Auteur : Sylvain Soulard
Introduction et mise en page : Kelian Schindowsky